

磁致伸缩液位传感器是利用磁致伸缩材料的磁致伸缩效应来实现绝对位移的测量,是一种非接触式绝对位置测量的传感器。其具有可靠性强、测量精度高、安全性好、易于安装维护、便于实现系统自动化等优点,被广泛应用于石油、化工行业原料储存、罐区管理、加油站地下库等需要液位、位移、液体密度、温度、压力等多参数测量的工业领域,尤其应用于工况恶劣的场合。
近年来,国内外学者主要在材料测试、信号分析、结构设计和系统模型等方面对于磁致伸缩液位传感器进行研究,旨在提高测量精度,改善传感器性能。但在影响磁致伸缩液位传感器测量精度的各种因素中,被测液体的温度变化是不可忽视的重要影响因素。
为了分析温度对磁致伸缩液位传感器测量精度的影响,本文重点从被测液体温度变化影响浮子浸入被测液体深度方面进行了研究,并首次建立了温度补偿数学模型,推导出了基于磁致伸缩液位传感器的液位测量温度补偿算法,并将温度补偿算法很好的应用于港口装卸场桥油箱的油位测量中。
1磁致伸缩液位传感器
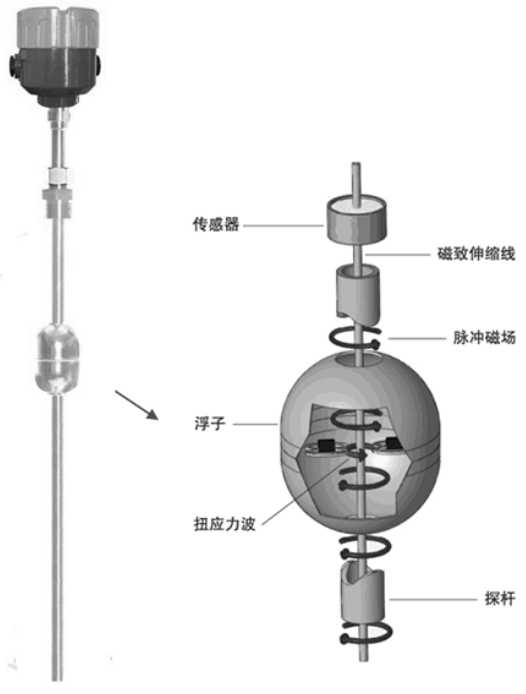
磁致伸缩液位传感器主要由测杆、磁致伸缩线、可移动浮子、电路单元等部分组成,如图1所示。液位计工作时,电路单元中的脉冲发生器首先在磁致伸缩线上产生一个电脉冲,该电脉冲沿磁致伸缩线传播时会在磁致伸缩线的周围产生脉冲电磁场。在液位计测杆外的浮子内部有一组永久磁环,当脉冲电磁场与浮子磁环固有磁场相遇时,二者的磁场相叠加,使得磁致伸缩线在浮子所在的位置产生一个扭转波脉冲,这个脉冲以固定的速度沿磁致伸缩线返回到电路单元,并由电路单元检出,通过测量电脉冲与感应扭转波脉冲之间的时间差,就可以精确地计算出浮子所在的位置,即被测液面的高度。
2温度对测量精度的影响
温度对磁致伸缩液位传感器测量精度的影响主要表现在两个方面:一是温度变化对扭转波在波导丝内传播速度的影响;二是温度变化会引起被测液体密度的变化,密度变化会导致浮子浸入被测液体的深度发生变化,给液位测量带来误差。本文主要分析温度变化对磁致伸缩液位传感器浮子浸入被测液体深度的影响。
2.1温度变化对扭转波传播速度的影响
磁致伸缩液位传感器是液位检测装置,这是利用磁致伸缩效应和浮力定理制造的。液位计算的数学公式为:
L=vt(1)
其中,L为浮子内永久磁环距离检测线圈的距离;t为从发射激励信号到检测到响应信号的时间间隔;v为扭转波在波导丝中的传播速度。
温度变化对扭转波传播速度的影响主要是因为波导丝是由磁性材料制作的,磁性材料一般对温度比较敏感,随着温度的变化,磁性敏感参数也会随着变化,从而导致扭转波在波导丝中的传播速度V受温度的影响。为减少温度对磁致伸缩液位传感器测量精度的影响,一般选择温度性能较好的波导丝。
2.2温度变化对浮子浸入深度的影响
温度变化对被测液体密度的影响是不可忽略的,一般而言,温度升高被测液体密度变小;温度降低被测液体的密度变大。根据阿基米德原理,浮球浸没在被测液体中的深度会随被测液体密度的变化而变化,被测液体密度变大,浮球浸入深度变小;被测液体密度变小,则浮球浸入深度变大,而浮球内永久磁环在浮球内的位置是不变的,所以被测液体密度的变化会导致永久磁环与液面的相对位置发生变化,如图2所示,即会导致公式(1)中L发生变化,从而影响液位的测量精度。

假设浮球浸入被测液体的深度为h,浮球浸入深度的变化量为Δh,室温下浮球排开被测液体的体积为V1,被测液体密度为ρ1,浮球的密度和体积为ρ2和V2,由阿基米德原理得:
P1gV1=P2gV2(2)
V1/V2=P2/P1(3)
ΔV1/V1=-ΔP1/P1(4)
设浮球的外径为R,内径为r,则:
ΔV1=π(R2–r2)Δh(5)
公式(6)为温度变化对圆形浮子浸入深度的补偿算法公式,即温度补偿算法,Δh为温度补偿量。
对于一个确定的磁致伸缩液位传感器而言,其浮球的外径R、内径r、密度ρ2,均为已知常数;室温下被测液体的密度ρ1已知,则室温下排开被测液体的体积V1也可以由公式(2)求得,因此公式(7)中的k为一个可确定的常数,温度补偿量Δh仅与被测液体密度随温度的变化量Δρ1有关,且为负相关。
推导出的温度补偿算法可以适用于任何被测液体和各类型的磁致伸缩液位传感器,应用时只需知道所选磁致伸缩液位传感器浮子的内径r、外径R、密度ρ2、室温下被测液体的密度ρ1和被测液体密度随温度的变化量Δρ1,就可以根据温度补偿算法计算出液位补偿量Δh。
3温度补偿算法的应用
场桥是港口行业对于轮胎式集装箱门式起重机的简称,是集装箱货物进行堆码作业的专用机械,按驱动方式场桥可分为用电场桥和用油场桥两种。本次应用的场桥型号为SPMP40.5T型用油场桥,选用CE43-11-2C型磁致伸缩液位传感器(带温度传感器)用于该场桥油箱的油位测量。场桥及液位传感器如图3所示:
(a)SPMP40.5T型用油场桥(b)CE43-11-2C型磁致伸缩液位传感器(c)液位传感器安装图(d)传感器信号传输DTU
博尔森磁致伸缩液位传感器相关技术参数如表1所示。

表1博尔森磁致伸缩液位传感器技术参数
| 参数 | 规格 |
| 液位输出 | |
| 测量参数 | 液位 |
| 测量范围 | 150-1500mm |
| 输出信号/协议 | RS485信号 |
| 分辨率 | 150μm |
| 线性误差 | 优于±0.05%FS |
| 温度输出 | |
| 测量参数 | 温度 |
| 测量范围 | ﹣40℃–﹢60℃ |
| 温度精度 | 优于±0.28℃ |
| 电气连接 | |
| 输入电压 | 24V±2.4V·DC |
| 极性保护 | 串联二极管 |
| 产品功耗 | ≤15mA |
| 出线方式 | 接线端子连接 |
| 结构材料 | |
| 传感器电子仓 | 1Cr18Ni9Ti |
| 传感器测杆 | 0Cr18Ni9Ti |
| 浮子 | 1Cr18Ni9Ti |
| 结构尺寸 | |
| 测杆长度 | 1500mm |
| 测杆直径 | φ10mm |
| 浮球外径 | φ37.5mm |
| 浮球内径 | φ11mm |
| 浮球密度 | 0.66g/cm3 |
| 防爆类型 | 本安型,ExiaIIBT5 |
由此型号磁致伸缩液位传感器技术参数表可以得到浮球外径R为37.5mm;内径r为11mm;密度ρ2为0.66g/cm3。
设ρt为温度T℃时油品的密度,温度为20℃时的油品密度称为标准密度,用ρ20表示,油品密度与
温度的关系为:
Pt=P20-α(T-20)(7)
ΔP=Pt-P20=-α(T-20)(8)代入公式(6),可得到:
Δh=k(9)
P1P20
式中α为油品密度的修正系数,柴油的密度修正系数为0.8894,20℃时的柴油的密度ρ20为0.855g/cm3。
代入公式(9)中,可以得到:
Δh=kα=0.043(10)
公式(10)即为CE43-11-2C型磁致伸缩液位传感器用于柴油油位测量时的温度补偿公式,0-50℃范围内的柴油密度和油位补偿量见表2及图4。
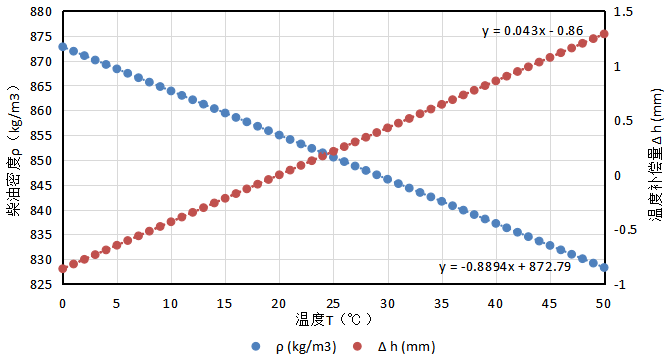
图4温度与柴油密度和补偿量关系图
由上图和表可以清楚的看到,柴油密度随温度的
升高而减小,因温度变化导致的液位测量补偿量以20℃为中心零点进行变化,温度与20℃相差越大,补偿量也越大。同时,温度补偿量的绝对值大于该磁致伸缩液位传感器的分辨率150μm,可以间接地提高了传感器的测量精度。
将得到的补偿公式(10)应用于场桥油位的监测中,磁致伸缩液位传感器每分钟实时采集一次场桥油箱的油位数据和温度数据,利用补偿公式对采集的油位数据进行实时修正,通过公式(11)得到不同温度下的更为准确的油位数据。
H=H1+Δh(11)
式中,H为修正后的液位值,H1为测量的液位值。
4结论
通过分析温度变化对磁致伸缩液位传感器浮球浸入被测液体深度的影响,从理论上推导得到了圆形浮球浸入深度变化与被测液体密度变化的计算公式,得
表2各温度下柴油密度和油位补偿量
| T(℃) | ρ(kg/m3) | Δh(mm) |
| 0 | 872.79 | -0.86 |
| 1 | 871.90 | -0.817 |
| 2 | 871.01 | -0.774 |
| 3 | 870.12 | -0.731 |
| 4 | 869.23 | -0.688 |
| 5 | 868.34 | -0.645 |
| 6 | 867.45 | -0.602 |
| 7 | 866.56 | -0.559 |
| 8 | 865.67 | -0.516 |
| 9 | 864.78 | -0.473 |
| 10 | 863.89 | -0.43 |
| 11 | 863.00 | -0.387 |
| 12 | 862.12 | -0.344 |
| 13 | 861.23 | -0.301 |
| 14 | 860.34 | -0.258 |
| 15 | 859.45 | -0.215 |
| 16 | 858.56 | -0.172 |
| 17 | 857.67 | -0.129 |
| 18 | 856.78 | -0.086 |
| 19 | 855.89 | -0.043 |
| 20 | 855.00 | 0 |
| 21 | 854.11 | 0.043 |
| 22 | 853.22 | 0.086 |
| 23 | 852.33 | 0.129 |
| 24 | 851.44 | 0.172 |
| 25 | 850.55 | 0.215 |
| 26 | 849.66 | 0.258 |
| 27 | 848.77 | 0.301 |
| 28 | 847.88 | 0.344 |
| 29 | 847.00 | 0.387 |
| 30 | 846.11 | 0.43 |
| 31 | 845.22 | 0.473 |
| 32 | 844.33 | 0.516 |
| 33 | 843.44 | 0.559 |
| 34 | 842.55 | 0.602 |
| 35 | 841.66 | 0.645 |
| 36 | 840.77 | 0.688 |
| 37 | 839.88 | 0.731 |
| 38 | 838.99 | 0.774 |
| 39 | 838.10 | 0.817 |
| 40 | 837.21 | 0.86 |
| 41 | 836.32 | 0.903 |
| 42 | 835.43 | 0.946 |
| 43 | 834.54 | 0.989 |
| 44 | 833.65 | 1.032 |
| 45 | 832.77 | 1.075 |
| 46 | 831.88 | 1.118 |
| 47 | 830.99 | 1.161 |
| 48 | 830.10 | 1.204 |
| 49 | 829.21 | 1.247 |
| 50 | 828.32 | 1.29 |
到了温度补偿算法。并将温度补偿算法应用于柴油油位测量中,得到了更为具体的温度补偿计算公式和各温度下的柴油密度和油位补偿量,间接地提高了传感器的测量精度。
(2)该温度补偿算法不但可以应用于柴油油位测量中,还可以应用于其他场景及介质的液位测量,适合于任何被测液体和各类型的磁致伸缩液位传感器,具体应用方法可参考本文中的柴油油位测量。
(3)要实现磁致伸缩液位传感器的高精度,不仅要有高精度的测量原理与方法,还必须配有必要的校正措施和温度补偿方法。在实际应用过程中可以根据温度传感器得到的实时温度数据和液位传感器得到实时液位数据,通过温度补偿计算公式,对测量得到的实时液位数据进行修正,计算出更为准确的修正液位数据,从而间接的提高磁致伸缩液位传感器的测量精度,这对于磁致伸缩液位传感器的准确计量具有较大的意义。
 微信扫一扫
微信扫一扫
