

根据磁致伸缩位移传感器工作原理,设计磁致伸缩位移传感器系统的总体框图如下图所示。
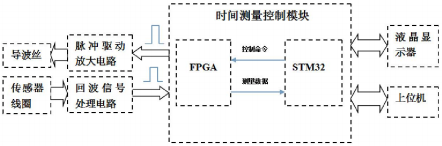
从系统框图中可以看出,系统分为脉冲驱动放大电路、回波信号处理电路、时间测量控制模块、液晶显示模块以及上位机通讯部分。其中时间测量控制系统是整个系统的核心,在本系统中采用FPGA+STM32的架构实现时间测量与系统控制。脉冲驱动放大电路用于对FPGA发出的激励脉冲进行功率放大,信号后处理电路用于对接收线圈的输出信号进行滤波放大整形等处理,液晶显示模块用于显示时间与位移等测量信息,上位机通讯部分用于程序下载以及程序调试信息的输出。
系统工作时,STM32向FPGA发送控制命令,FPGA输出周期性激励脉冲信号,同时启动时间测量模块进行计数。激励脉冲经过功率放大之后驱动导波丝产生扭转波,扭转波在线圈处因磁致伸缩逆效应转换为线圈处的磁场变化,并经过电磁感应转换为电信号,此微弱的电信号经过信号后处理之后得到最后的整形回波脉冲,并输入到FPGA中,FPGA捕获到整形回波脉冲之后停止计数,计算得到相应的时间与位移信息并通过中断通知STM32读取,STM32将读取时间和位移信息并显示到液晶屏幕上,从而完成一次测量。
 微信扫一扫
微信扫一扫
