

1、引言
在预应力筋用锚具的锚固性能试验中,通常用活塞位移代替试样变形来计算预应力筋一锚具组装件达到实测极限拉力时预应力筋的总应变εpa,这就要求对锚固试验机的活塞位移进行准确测量。现在锚固试验机的活塞位移测量装置结构复杂且测量效果不好,笔者对此装置提出了改进方案。
2、现在的测量装置
现在的测量装置是使用拉线式光电编码器进行活塞位移测量的,其组成结构如下图所示。

光电编码器安装在油缸上,相对于试验机机座不动。拉线部分通过挂钩连接到滑块上,滑块可以在导向杆上前后滑动。导向杆共有两根,一端由连接块连接,另一端由固定块固定在油缸上。接触螺钉与滑块通过螺纹连接,端部与活塞相接触。当活塞伸出时,推动接触螺钉移动,接触螺钉带动滑块滑移,从而将光电编码器的拉线拉出,编码器经过一系列转换最终测量出活塞的位移量。当活塞收回时,压缩弹簧推动滑块复位。滑块和导向杆之间有一个铜套,可增加滑块的运动平稳性。
3、存在的问题
由上文的介绍可知,现在的测量装置结构复杂,辅助零件多,装配困难,而且关键件如导向杆、铜套等公差要求较高,大大提高了生产成本。再进一步分析,可以发现当活塞由油缸最底部伸出时,由于滑块上的铜套和导向杆之间会有间隙,光电编码器会
首先出现负值,然后再增大到正值,这就造成了活塞初始位移不准的问题。另外,光电编码器和滑块是相对独立的,且均是配作安装的,于是,编码器的拉线与活塞轴线并不是完全平行的,而是有一定的角度偏差。因此,活塞位移的真实值和编码器的测量值之间就会有一个差值,而且这个差值和活塞的位移量是不成比例变化的。
为了解决现有测量装置中存在的问题,实现对活塞位移方便有效的测量,笔者提出了一种新的测量装置的设计方案。
4、新方案的设计
从活塞位移测量的根本要求入手分析,主要有3点要求:(1)实现对活塞位移的准确测量;(2)测量结果不能受活塞径向转动的影响(活塞在工作中可能会出现径向转动);(3)结构简单,安装方便,使用性不受安装误差的影响。
为满足以上3点要求,新方案采用了磁致伸缩位移传感器。
(1)磁致伸缩位移传感器
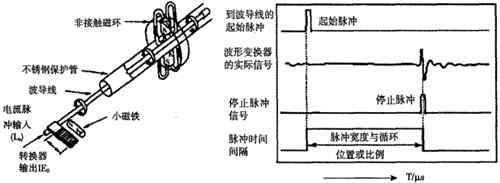
磁致伸缩位移传感器是利用铁或镍在磁场作用下具有伸缩能力的特性而设计的线性位移传感器,它主要由活动磁环、脉冲检测器、具有磁致伸缩特性的波导管及电子系统组成。测量过程是由传感器的电子室内产生电流脉冲,该电流脉冲在波导管内传输,从而在波导管外产生一个圆周磁场,当该磁场和套在波导管上作为位置变化的活动磁环产生的磁场相交时,由于磁致伸缩的作用,波导管内会产生一个应变机械波脉冲信号,这个应变机械波脉冲信号以固定的声音速度传输,并很快被检测器所检测到。由于这个应变机械波脉冲信号在波导管内的传输时间和活动磁环与电子室之间的距离成正比,通过测量时间,就可以准确地确定这个距离。磁致伸缩位移传感器工作原理如下图所示。
(2)改进的测量装置
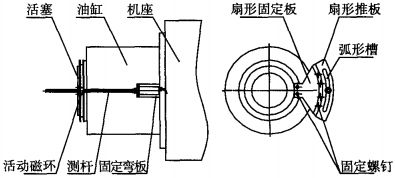
改进后的测量装置由于采用了磁致伸缩位移传感器,整体结构大大简化,主要由磁致伸缩位移传感器、固定弯板、扇形推板和扇形固定板组成(如上图所示)。
位移传感器由固定弯板固定在油缸上,两块扇形推板由扇形固定板安装在活塞上,活动磁环夹在两块扇形推板中间,扇形推板上有弧形槽供波导管穿过。当活塞伸出时,扇形推板推动活动磁环移动,传感器随即测出相应的位移。如果活塞发生一定的转动,由于扇形推板上有弧形槽,波导管不会出现被碰弯的情况。另外,即使波导管和活塞轴线不完全平行,致使活塞位移的真实值和编码器的测量值之间有一个差值,但该差值与活塞位移是成比例变化的,所以传感器依然可以测出活塞的真实位移。
5、性能对比
将两套测量装置进行一下对比,明显可以看出:改进后的测量装置结构简单,安装方便;新测量装置不存在初始位移不准的问题,而且测量精度不受安装误差的影响。另外,磁致伸缩位移传感是利用磁致伸缩效应研制的传感器,该传感器可以实现非接触、绝对式测量,具有高精度、大量程的特点;特别是由于磁环和传感器并无直接接触,因此传感器可应用在恶劣的工业环境,如易燃、易爆、易挥发、有腐蚀的场合。此外,传感器能承受高温、高压和高振荡的环境。传感器输出信号为绝对数值,所以即使电源中断重新连接也不会对数据构成影响,更无需重新调整零位。
6、结论
通过两套测量装置的性能对比可以看出,改进后的测量装置具有无可比拟的优越性,解决了原有测量装置中存在的问题,对锚固试验机活塞位移的准确测量提供了保障。
 微信扫一扫
微信扫一扫
