

随着工业自动化的不断发展,对液压(气)缸的位移检测要求越来越高了。在此介绍一种磁致伸缩式位移传感器,它具有高精度、高分辨率及高可靠性等特点,能进行模拟输出和数字输出,与计算机有良好的相容性。
1、工作原理
磁致伸缩式位移传感器是一种利用在金属中传播的机械弹性波,把位移变换成其传播时间,检测被测物绝对位移的传感器。
磁致伸缩现象是镍、铁氧体或铁系非晶体金属等强磁体中特有的现象。如给这类金属以磁场,则随其强度引起磁畴变动及金属变形。其基本原理如下图所示。位于中央的是形成机械弹性波波导管的磁致伸缩金属线,在它轴向方向配置非接触移动的磁体,则会给其附近的磁致伸缩金属线以轴向磁场。当在磁致伸缩金属线上按箭头A所示方向附加电流脉冲时,在磁致伸缩线的整个轴向范围便产生周向磁场,周向和轴向磁场矢量合成倾斜磁场(虚线所示),因周向磁场产生于瞬间,所以倾斜磁场也瞬间产生。
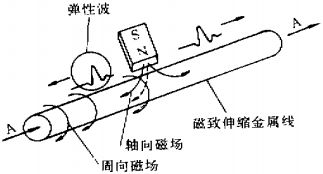
一旦在磁致伸缩金属中的磁场瞬间变化时,则金属随其瞬间变形。变形的瞬间变化(或产生)将形成弹性波,在金属中向两端传播。上述的倾斜磁场因作用于磁致伸缩金属线的扭转方向,所以其弹性波以扭转弹性波(横波)形式传播。其传播速度v为
v=√G/p
式中,G为磁致伸缩金属线的刚性率,p为密度。
通过在始端设置变形检测器(例如,利用压电元件或逆磁致效应的拾波线圈),可以把弹性波的到达变换成电信号。
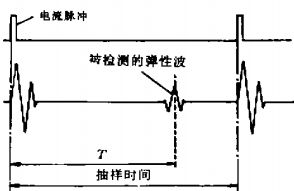
如磁体距变形检测器距离为L,则附加电流脉冲A之后,经时间T(=L/v)便可测得弹性波。因A的附加具有适当的时间间隔,所以磁致伸缩位移传感器可以说是一种抽样式的绝对位移检测器。其状态如图2所示。
抽样的周期由需检测的行程和弹性波的传播速度决定。行程长时存在响应性不够快的不足。行程不足300mm时,理论抽样周期为10kHz左右。
3、磁致伸缩式位移传感器的结构
该传感器的磁致伸缩金属线完全封闭在不锈钢套管中,具有优良的耐环境性。通过对不锈钢套管构造的合理设计,可以使其耐压能力达到80MPa。
安装在被测物上的磁体可以取任意形状,例如对于设有内部磁体的无杆气缸,如果在非磁体的缸体外侧配置这种传感器,便能间接地测出活塞位移。由于磁体和不锈钢套管是非接触的,所以传感器的机械寿命无限长。
4、性能
如下图所示,磁致伸缩式位移传感器由与机械位置成正比变化的时间间隔测得位移。众所周知,在各种物理量中,时间是比较容易高精度测定的,所以与其他方式比较,这种传感器可以获得最好的精度。
如将时间信号积分,则可通过简单的方法将其变换成模拟信号,但集成电路等电气元件上存在固有的温度偏差,为对此进行补偿需相当高的技术。在此为最大限度地发挥磁致伸缩式位移传感器的优势,介绍一下位移检测方法。
水晶振荡式的时间计测是工业领域中稳定性、精度、可靠性最好的一种方式,因此,磁致伸缩式位移传感器的信号用时间给予。附加电流脉冲之后,打开弹性波到达的间隔选通电路,对水晶振荡器的时钟脉冲计数。如用此方法,则可不使用模拟元件,用绝对数字信号直接获得与位移成正比的信号。例如,水晶振荡器的时钟脉冲为50MHz,则1个时钟脉冲显示的位移检测分辨率为0.6mm(弹性波的传播速度为3km/s时)。
其典型的性能如下:
线性0.05%FS
分辨率0.06mm(50MHz时钟脉冲时)
重复精度0.01~0.02mm
温度特性0.005mm/C
+5.4ppmFS/C
上述重复精度意味着滞后。磁致伸缩式位移传感器是一种应用磁现象的传感器,所以不可能一点也没有磁形成的滞后。另外,温度特性中的第一项是传感器头部电气部分引起的温度偏差,第二项是弹性波传播速度的温度系数,有时第一项是不能忽略的。对此,出现两个磁体的方式,该方式中磁体1固定,磁体2移动,如检测这两个弹性波的到达时间差T₃,则温度偏差仅为5.4ppmFS/C。
为改善温度特性,也可以用图5所示的三个磁体的方式。该方式中磁体1和3固定,
磁体2移动,检测T₁₂和T₃理论上可得到不含温度偏差的信号T,T。按下式计算:
T₀=T₁₂/T₁₂
 微信扫一扫
微信扫一扫
