

一、前言
磁致伸缩传感器具有测量精度高、使用寿命长、耐腐蚀、耐尘、耐压、耐高温、耐高振荡等一系列特点,已在行程测量和液位测量中得到了愈来愈多的应用。由于它的测量原理是通过计算两个不同磁场相交所产生应变脉冲信号的时间周期,再根据声波的传递速度获得准确的位置值。在测量过程中,传感器内波导管的电流脉冲和应变脉冲不可避免地对测量的输出信号产生一定的干扰,强度可以达到满量程的0.2%。在一些模拟控制系统中,它的影响程度不明显、可以忽略。若对高精度的数字式控制系统,它的影响程度是很明显的,甚至于影响到系统的稳定,必须予以消除。
二、输出信号的特点
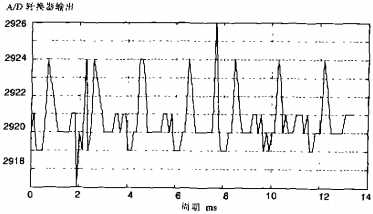
图1是计算机通过AD采集卡得到的磁致伸缩传感器的输出信号,此时磁环与测杆处于相对静止状态。从图1可以看出测量的稳定值为2920,AD卡的模数转换精度为±1;干扰脉冲的峰值为4、周期约2ms,是一个频率较高的干扰;每个千扰周期内,干扰段与正常段之比为1:4,若测量点落入正常段,获得的测量值是正确值,否则为干扰值。可见采用单次测量方法,得到非正常值的机率是比较高的,接近20%。因此在高精度的测量场合下,测量一个位置值,最好是进行连续的多次测量,得出一组测量值,并使这组测量值至少包含一个干扰周期,以便从中获得一个能够代表正确值的测量值。这组测量值中的最小值,就是正确的测量值,即测量信息特征值。得出的正确测量值,还应进行必要的平滑滤波,以避免测量过程中出现的意外干扰。本文的滤波方法就是基于此思路实现的。
三、滤波算法
1、采样间隔T的选取
采样间隔T应以香农采样定理为确定的依据,以使采样的数据能正确的反映实际情况,这对于动态测量尤为重要。根据香农采样定理,采样间隔T为:
T≤2π/2wh (S)
这里,wh为被测信号中最大的角频率分量。根据图1的特性,可以计算出来能够正确反映被测信号的采样间隔T=0.1ms。考虑到采样的目的是获取信号中的最小值,采样间隔T可以适当加大,提高采样效率。取T为0.25ms,每组采样数为8个,是比较合适的。
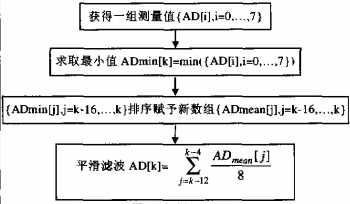
2、滤波框图
滤波框图见图2,得出的AD[k]为当前时刻的测量值。
四、试验验证
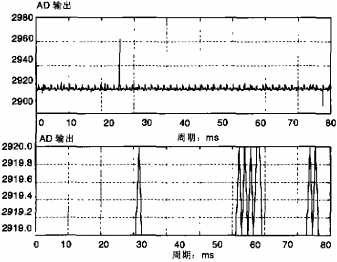
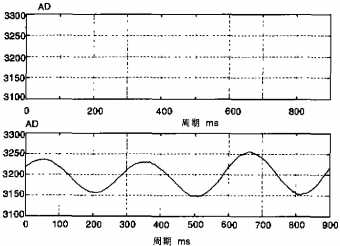
根据上节滤波算法编制的软件,在两个典型的测量场合中进行了实际应用。图3是对磁环处于静态时的静态特性测量,图4是对磁环处于运动时的动态特性测量。每组图中,上图是原始测量曲线,下图为通过滤波算法后得出的测量曲线。
图3的下图表明本算法具有良好的测量精度和稳定性,同时还减轻了AD采集卡的转换精度对测量精度的影响。图4的下图表明本算法不仅具有良好的测量精度和稳定性,同时还具有良好的动态测量特性。
五、结论
试验结果表明,本文提出的基于特征值提取的平滑滤波的数字滤波方法,具有算法简洁、测量精度高、动态特性好的特点,很好地解决了磁致伸缩传感器输出信号的滤波问题。同时也说明,通过合适的滤波方法,能够使该类传感器充分发挥测量精度高的特点,有助于扩展其在高精度测量场合中的应用。
 微信扫一扫
微信扫一扫
