

0、引言
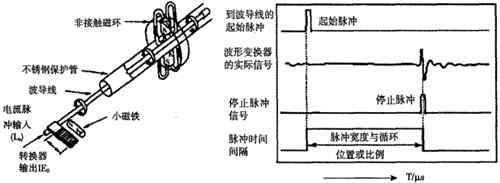
磁致伸缩液位传感器是利用材料的磁致伸缩效应感受液面浮子的变化,从而达到非接触测量油位的目的。如下图所示,传感器工作时,由脉冲发生器向磁致伸缩波导线上加一个电流脉冲,此脉冲同时伴随一个环形磁场以光速沿磁致伸缩波导线向前传播。当该环形磁场遇到磁浮子中的永磁铁产生的轴向稳恒磁场时,产生叠加并形成一个螺旋形磁场。根据磁致伸缩原理,它将使磁致伸缩波导线产生瞬时扭转变形,从而形成扭转波,该扭转波以恒定的速度沿磁致伸缩波导线向永久磁铁的两个方向传播,当传到末端时,被衰减阻尼装置吸收,而返回的扭转波被固连在波导线上的回波接收装置接收并转化为电脉冲,该脉冲经放大后送到测量电路中。扭转波在磁致伸缩波导线中的传播速度为V=√G/p,式中,G为波导线的剪切弹性模量,p为波导线密度。对一定的波导线来说,由于G和p均是恒定的,所以传播速度也是恒定的,约为3km/s。所以,只要测出发射脉冲和接收脉冲之间的时间间隔,就可以算出永久磁铁与接收装置之间的距离,进而求出液面的位置。
1、磁致伸缩液位传感器的工作电路
传感器的工作电路主要包括发射电路、接收电路及测量电路。在微处理器的控制下,由脉冲发射电路向磁致伸缩波导线发送激励电流脉冲,返回的扭转脉冲由接收电路进行接收、放大和整形处理,然后送入测量电路。
1.1发射电路
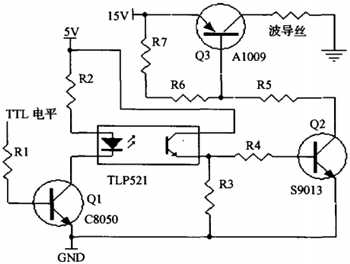
如上图所示,发射电路是将微处理器发出的TTL电平的窄脉冲进行放大,使其产生足够强度的电流脉冲。其中,光电耦合器TLP521在这里将脉冲发射电路与测量电路进行隔离,防止干扰产生。光电耦合器内发光二极管的驱动电流一般在10~20mA,不能直接由TTL电平驱动,所以采用三极管Q1来提高驱动能力。Q2为开关三极管,Q3是功率三极管,用来进行功率放大。
1.2接收电路
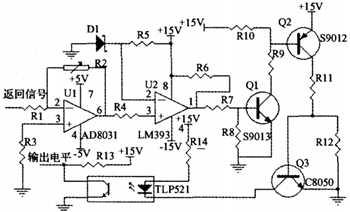
如上图所示,接收电路将感应线圈上得到的返回脉冲信号进行放大和整形,输入微处理器,作为计数器停止计数的中断信号。由于返回脉冲信号很微弱,由放大器AD8031进行放大,放大倍数由变阻器R2进行调节。放大后的信号由比较器LM393进行比较整形,其基准电压从电阻和稳压管构成的电路中取得,基准电压值由AD8031放大后的感应电压信号值决定,基准值应比此值稍低。比较整形后的信号经由S9013和S9012组成的电压放大级进行二次放大,并送入微处理器。TLP521将这部分电路与测量电路进行隔离,三极管C8050用于驱动TLP521。
1.3测量电路
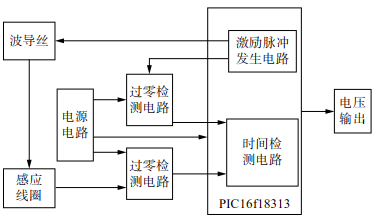
如上图所示,本系统采用单片机AT89C51为微处理器,产生TTL电平,经发射电路放大后加载在磁致伸缩波导线上,此电平也作为计数器开始计数的使能信号;同时单片机也接收来自接收电路的返回信号,作为计数器的停止计数信号,得到脉冲发射与返回的这段时间的计数值。系统采用AD590作为温度传感器,将温度值转化为电压值,再经8位A/D转换器ADC0809转换为数字量输入单片机,用于系统的温度补偿处理。系统采用82C54作为计数器,它为16为计数器,工作频率为4MHz,时钟由外加晶振提供。单片机读取计数器中计数脉冲数量后,计算出时间量,进而由扭转波的传播速度求出距离值。然后根据系统得到的燃油温度值,求出燃油密度,对距离值进行修正处理,得到液位的测量值,经HD7279芯片驱动数码管进行液位值显示。
2、燃油的密度变化对测量精度的影响及补偿方法
事实上,燃油温度变化会引起燃油的密度变化,浮子在燃油中的浸没程度又会随着燃油密度的变化而变化,这必将给液位测量结果带来一定的影响,必须加以修正。
设浮子浸入燃油的高度为h,浮子在燃油中的浸没高度变化量为△h,燃油的密度为p,燃油密度变化量为△p₁,利用阿基米德浮力定律,得出如下公式:
△h=h(-△p₁)/p₁(1)
式中:一表示浮子浸入燃油的深度随密度的增加而减小。
要修正此误差,可采用温度补偿算法,即定义为t℃时燃油的密度,温度为20℃时的燃油的密度称为标准密度,用d20表示。dt与d20有如下关系:
dt=d20-a(t-20)(2)
式中:a为燃油密度的修正系数。在无法直接测量燃油密度的情况下,通过测量燃油温度估算出燃油密度,用单片机程序按照公式(1),求出浮子在燃油中的浸没高度变化量,再进行温度补偿,实现误差的修正。另外,减小浮子半径或减轻浮子重量都可以有效地减小燃油密度变化对测量精度的影响。
3、结束语
本文将磁致伸缩技术移入到飞机油量的实时测量中,将大大提高飞机油箱油位的测量精度,对于准确估计飞机续航时间,保障飞行安全具有重要意义。
 微信扫一扫
微信扫一扫
