

磁致伸缩位移传感器是用非接触测量方法测量活动磁铁,由于磁铁和传感器并无直接接触,因此,传感器即使在恶劣的工业环境下(如易受油渍、溶液、尘埃或其他的污染场合),也能正常工作。此外,还能承受高温、高压和强振动。
近年来,磁致伸缩位移传感器,无论在精度上,性能上都有了很大的提高。同时,根据不同的应用领域,输出接口也更多样化,增加了 一 些信号处理 、修正电路。
1、工作原理
一 个基本的敏感元件,利用磁致伸缩波导管来测量位置磁铁位移的基本原理。工作原理是,利用两个不同的磁场相交产生一个超声波信号 ,然后计算这个信号被探测所需的时间,便能换算出准确的位置。
传感器的电子部件发出一个电流脉冲,这样就在波导管上产生一个环绕其周围的磁场。当这个磁场与位置磁铁所产生的纵向磁场相交时,就产生一个超声波信号,这个信号沿波导管一直传到末端的传感器元件。因为声波在波导管上的速度接近3 km/s。用从产生电流脉冲的一刻到测到信号所需的时间乘以这个固定速度,就可以得出磁铁位置。这个过程是连续不断的,所以,每当磁铁移动时,新的位置就会被感测出来。
①位置计算
位置/mm=时差/s *传感器的传送速度/mm·s-1-零点位置/mm
②更新时间及频率响应
传感器的更新时间对伺服控制机械的应用非常重要。由于磁铁距离传感器的电子零件越远,声波传播所需的时间就越长,所以传感器的更新时间与距离成正比。传感器最长新时间可估算如下:
更新时间=(量程+零点位置)/传感器传送速度
等价频率响应= 1/更新时间
③性能参数
以国外某公司的新产品性能为例:最大分辨率0.006mm; 非线性误差0.02%; 磁滞误差< 0.02 mm; 量程25 ~ 3050 mm; 使用温度范围- 40 ~ + 70℃。
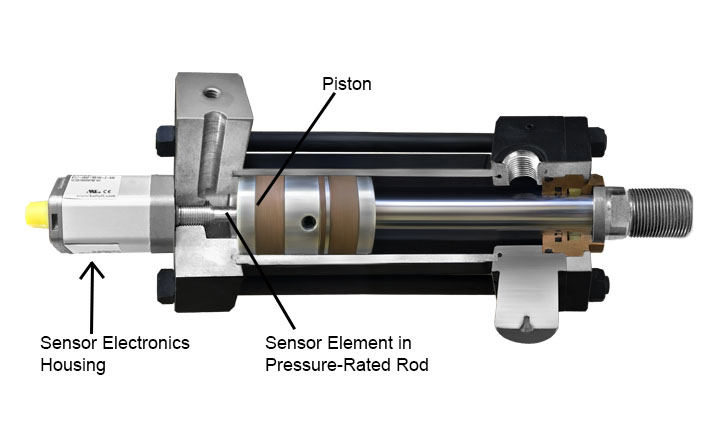
2、液压系统活塞速度测量的应用
液压泵控制装置作为一种反馈系统。如果是从一点到另 一 点的位移控制,位移反馈是足够了;如果要想得到连续的曲线描述,则速度反馈是必需的。因为高精度的速度值并不容易得到,同时液压泵是一个封闭环境,提供速度反馈很难。磁栅式位移测量仪等传感器只能在敞开环境中使用,无法解决这个问题,磁致伸缩位移传感器以内置方式,可以测出活塞速度,实现速度反馈,如下图所示。
因为磁致伸缩传感器是一种位移传感器 ,所以速度必须通过一系列连续位置数据测定。以RHM-700传感器为例(RHM-700传感器是一种磁致伸位移传感 器,它的可重复性误差为0.01%FS,量程为700mm,一周期采样次数为5次),其速度分辨率为:
【△V】=2*可重复性误差*量程/采样次数≤2*0.01/100*700/5=28mm/s
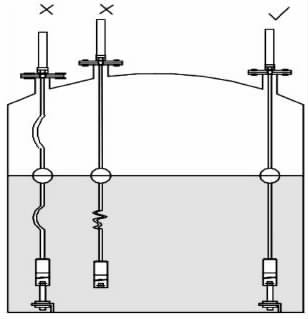
3、特殊情况下液位测量应用
在一些特殊情况下,例如高温、强腐蚀性的液体,需测液位时,可以采用下图所示的磁致伸缩位移传感器,不接触液体,通过测量浮子的位置得出液位。
4、磁致伸缩位移传感器的新发展
1)模块设计
现在国际上的磁致伸缩传感器大都采用了模块方式组装而成,主要模块包括:基本磁致伸敏感元件、电子模块、内接线插头、应用外壳,控制线插头。这种设计不但利用生产、安装、维修,更增加了各个组件的抗冲击、抗振荡能力。
2)多种输出方式
除了具有一般的数字接口,RS422信号方式,脉冲宽度可调制PWM外,还增加SSI同步串行接口,以及CAN总线。
3)温度补偿电路
对磁致伸缩传感器进行温度补偿。可以使传感器在更宽的温度范围内工作,同时更提高f传感器的测措精度。
5、结论
磁致伸缩位移传感器以其高精度、高性能,以及灵活的测母方式,在各种自动化控制领域有着广泛的应用。国内市场十分广阔。
 微信扫一扫
微信扫一扫
