

1、系统结构
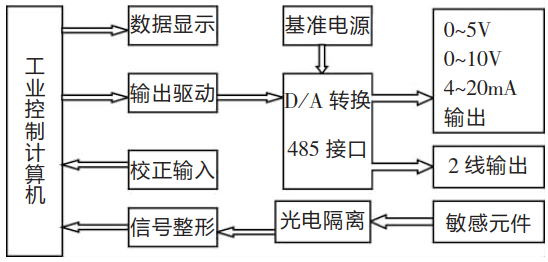
磁致伸缩位移传感器位移测量系统的硬件结构如图4所示。由于磁致伸缩位移传感器采用符合工业控制标准的4~20 mA电流环输出的形式,故需要先把传感器的输出电流信号转换为电压信号,再采集出来进行A/D转换,然后输出给单片机进行信号处理以及通信处理,最后将理想的传感器信号以二进制方式传送给液晶示屏和PC机叫。传感器的电路是由敏感元件头、接收电路、信号整形电路、参数校正输入电路、计算机处理电路、显示电路、测量参数输出电路等组成。
2、微处理电路
单片机选用ATMEL公司基于CMOS工艺的8位微处理器AT89C4051,与MCS-51产品系列的指令完全兼容,片内含有4kb的Flash EPROM,它最突出的特点是芯片体积小,只有20个引脚,特别适合于小型化系统的设计。另外, AT89C4051价格便宜,性价比较高。
3、信号整形电路
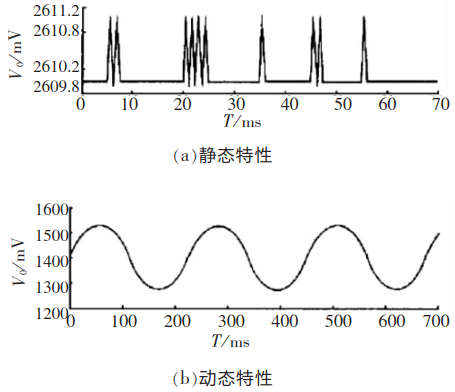
采用基于抽取被测信号特征量的滑动数字滤波算法。如下图所示,就是磁环在静止状态下,磁致伸缩位移传感器输出的模拟信号波形。可以看出,在测量稳定值上叠加有一个频率较高的干扰信号存在,其最大峰-峰值约为25mV,周期为440μs。如果直接将单次测量值采样传送给控制器,在高精度的测量场合下,随机得到非正常测量值的几率是比较高的,最大误差为12个LSB。因此,最好是对某一位移量进行连续的多次测量,得到一组N个测量值,并使这组测量值包含一个干扰周期,便从中获得一个能够代表正确值的测量值。信号整形电路的结构包括测量运算放大器、光电耦合器;功能是对测量放大信号整形后送计算机。89C4051是系统硬件实现数字化处理的核心部分,它的主频工作在11.0592 MHz,包括有一个外围复位电路。主要用于完成控制A/D转换、信号处理、向主机和LCD以串行方式发送数据等几个方面的功能。用单片机的P3口作为A/D转换及通信的控制线。在读取A/D转换值时,直接用PI口分两次读入12位A/D转换值。
下图为使用了数字化处理系统磁致伸缩位移传感器的磁环分别处于静态和动态时的测量特性。(a)表明系统有良好的测量精度和稳定性,误差只有1个LSB;(b)表明本系统具有良好的动态测量特性。
4、参数输入矫正电路
矫正电路是由MAX25C045、键盘和选择开关组成,功能是对磁致伸缩位移传感器的零位、满量程进行调整,并对波导电流脉冲传递速度设定和参数存储。
5、测量参数输出电路
数据输出包括12bit 高速D/A转换芯片MAX5302及运算放大器输出0~5V ,0~10V ,0~10 mA,4~20 mA的测量数据;二进制数据输出包括485接口芯片MAX 1428输出二进制测量数据,数据传递距离可达1000m以上。
 微信扫一扫
微信扫一扫
