

磁致伸缩位移传感器( Magnetostrictive Position Sensor)的结构如下图所示。壳体采用铸铝铸造(耐腐蚀可在表面涂漆)。位置磁铁通常装在运动部件A上,而传感器主体则装在固定部件B上。位移传感器工作时,电子信号和处理系统(5)发给磁致波导钢丝(1)间隔为T的激励脉冲电流ie。该脉冲电流将产生一个围绕波导钢丝(1)的旋转磁场。位置磁铁(4)也产生一个固定的磁场。在这两个磁场的共同作用下,使波导钢丝产生磁致弹性伸缩,即形成一个磁致旋转波(2)。该旋转波沿着波导钢丝以2800m/s的速度向两边传播。当它传到波导钢丝一端的波检测器(3)时被转换成电信号Ua。通过测量磁致旋转波从位置磁铁(4)传到波检测器(3)的时间tL就能确定位置磁铁和波检测器之间的距离。这样,当部件A和B产生相对运动,通过磁致伸缩位移传感器就可以确定部件A的位置和速度。
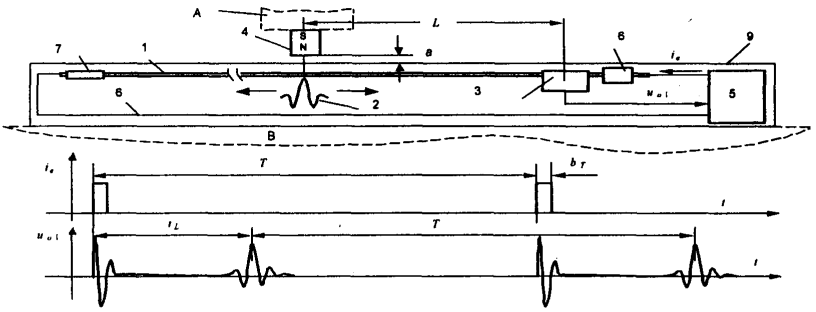
(1-波导钢丝;2-磁致旋转波;3-波检测器;4-位置磁铁;5-电子信号和处理系统;6-波反射器;7-减波元件;8-回线;9-传感器壳体)
在波导钢丝的另一端,磁致旋转波将通过减波元件(7)被大大削弱,以避免反射的波形对测量精度造成影响。波反射器(6)是用于改善电信号Ua的波形和加强电信号的大小。
磁致伸缩位移传感器的测量原理是基于时间测量。位置磁铁和波检测器之间的距离可如下确定
L= VwtL
式中:tL为发射脉冲与反射脉冲的时间差
Vw为旋转波的波速
L为磁铁和波检测器间距
该磁致伸缩位移传感器系统属于绝对测量系统。是磁致伸缩位移传感器接通电源后,位置磁铁的位置可自动确定,断电有记忆功能,对测量精度不造成任保影响。
 微信扫一扫
微信扫一扫
