


1引言
磁致伸缩位移传感器具有高分辨率、高精度、高稳定性、高可靠性等优点,被广泛应用到各种领域,如机械自动化、液压系统、测量装置系统方面,特别是应用于战机、空中加油机的燃油测量、飞机、导弹和航天器的姿态控制、飞行模拟器等军事领域,对提高我军战斗力具有极其重要的军事意义。
飞行模拟器是训练飞行员的一种有效方法,虽然它不可代替空中飞行,但是可以为掌握某些新的方法而减少所需的时间和经费。早在20世纪70年代,美国LINK公司开发出飞行模拟器,采用六自由度并联运动平台为其提供动感。我国在90年代,这项技术才受到各方面的重视,对于飞行模拟器的研究采用了六自由度运动系统这项关键技术。六自由度液压运动平台的电液伺服控制系统是采用位
置和压力两种反馈,其中位置反馈的检测元件最早采用了直线式位移传感器,经过长时间的使用证明其重复性不好,在运动平台系统高速的往返运动后其测量精度和工作稳定性差。日前,国内生产磁致伸缩位移传感器的厂家能够提供优质的货源,因此现在飞行模拟器中六自由度液压运动平台的反馈检测元件采用了磁致伸缩位移传感器。
2磁致伸缩位移传感器的工作原理
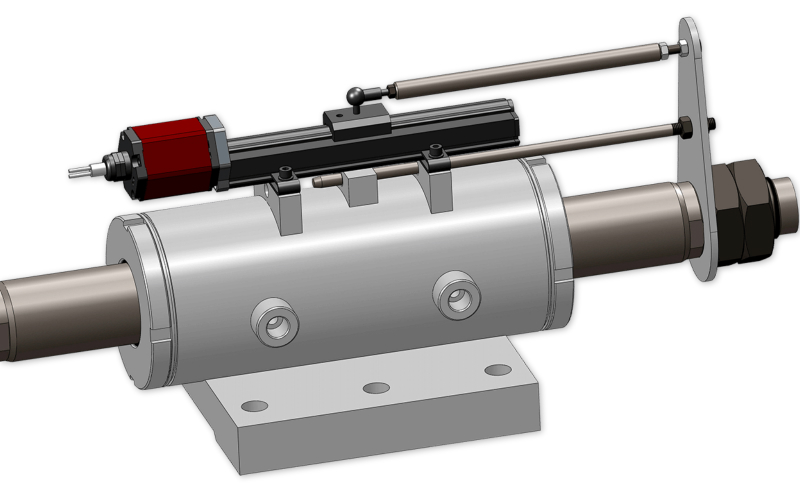
磁致仲缩传感器是利用某些磁物质(如Fe和Ni)在磁场作用下具有仲缩能力的特性而设计的线性位移传感器。在飞行模拟器上的应用是安装在六自由度运动平台液压缸上的外表面,是采用外置安装方法,如图1所示。该传感器由两部分组成:一部分是山液压缸出杆带动磁环运动的活动装置;另一部分是由支架固定在液压缸上具有电子仓的测量装置。
磁致仲缩传感器的工作原理是利用两个不同磁场相交时产生一个应变脉冲信号,然后计算这个信号被探测所需的时间周期,从而换算出准确的位置。这两个磁场一个来自活动装置磁环中的永磁铁,另一个来自传感器电子仓中的电子部件产生的激励脉冲。激励脉冲沿传感器内用磁致伸缩材料制造的波导管内的波导丝以声速运行。当与磁环中的永磁场相交时,由于磁致伸缩现象,波导丝产生的机械振动形成一个应变脉冲。应变脉冲很快便被电子仓中的感测电路探测到。从产生激励脉冲的一刻到应变脉冲被探测到总的时间乘以固定的声速,我们便能准确的计算出磁铁的位置变化。这个过程是连续不断的,每当磁环位置改变时,新的位置会迅速被测量出来。由于输出信号是真正的绝对值,而不是比例的或需要再放大处理的信号,所以不存在信号漂移或变值的情况,更不必像其他传感器那样需要定期重标。
3位移传感器在飞行模拟器中的应用
3.1为飞行模拟器提供可靠的动感
采用六自由度运动平台作为全任务飞行模拟器的运动系统,提供飞机运动过程中能感觉到的动感及过载信息,使飞行仿真更加逼近真实飞行。安装在飞行模拟器中的磁致伸缩位移传感器如图2所示,其安装方式见图1.传感器的测量装置由支架1固定在六根液压缸上,液压缸的出杆带动传感器的活动装置使磁环在波导管上以不接触的方式往复运动。

当飞行模拟器在正常工作时,由运动平台控制计算机实时接收主控计算机送来的飞机运动状态的各种参数,经解算产生驱动平台运动的电指令信号后,通过电液伺服阀控制六根液压缸活塞出杆的伸缩运动,在液压缸上同出杆固定在一起运动的磁环也因此作伸缩运动,所以液压缸活塞出杆的伸长量被传感器精确地检测到,形成硬件闭环负反馈控制。这样,飞行模拟器的运动平台系统便实时产生和模拟与飞机相似的过载、姿态及振动等信息,从而提高了模拟逼真度,为飞行模拟器提供了可靠的瞬时过载动感。
另外,磁致伸缩位移传感器不仅在飞行模拟器系统中形成位置闭环控制,而且还可以实现飞行模拟器液压缸位置和速度的限位,即预先确定好限位值,如果液压缸出现超行程则系统回到初始位置。因此,磁致伸缩位移传感器不但是提高飞行模拟器运动平台的位移和转角控制的关键件,还是整个系统安全运行的保障。
3.2利用测量值求结构正解
根据磁致伸缩位移传感器检测到六根液压缸的位移(伸长量),求飞行模拟器中六自由度运动平台的三个线位移和三个转角(x,y,z,φ,θ,w)被称为结构正解。结构正解目前还不能直接求得其解析解,但可以采用迭代方法以及利用计算机快速运算的特点和铰链的结构条件约束求得,这样求结构正解就变为解一个有六个未知数的非线性方程组。这里采用数值迭代方法的公式是:
an+1=an-f(an)-1f(an)(1)
其中,
a=[x,y,z,φ,B,ψ]
f(a)=[f1(a),f2(a)f₃(a)f₄(a)f₅(a)f₆(a)]
|L1|a是固定在液压缸上磁致仲缩位移传感器测量的实际位移(伸长量)。
对公式1移向得到
f(an)(an+1-an)+f(an)=0 (2)
求解公式2的方程组便可以得到an+1.选择初始条件a0和终止条件,经过多次迭代便可求出满足精度要求的([x,y,z,φ,B,ψ)值。
3.3使用效果
磁致仲缩位移传感器的量程通常在80mm~5000mm范围内,图2中采用的传感器量程选为1400mm,通过计算满足飞行模拟器的运动要求。在实际应用过程中计算机接口电路通过传感器电子仓采到的测量位移值与实际液压缸变化的位移数值如表1所示。
表1测试结果
| 实际位移(mm) | 测量位移(mm) | 输出误差 |
| 15 | 14.982 | 0.018 |
| 100 | 100.25 | 0.251 |
| 200 | 199.846 | -0.154 |
| 300 | 300.463 | 0.463 |
| 400 | 400.196 | 0.196 |
| 500 | 500.089 | 0.089 |
| 600 | 599.925 | -0.075 |
| 700 | 699.786 | 0.214 |
| 800 | 800.094 | 0.094 |
| 900 | 900.231 | 0.231 |
| 1000 | 1000.498 | 0.498 |
| 1200 | 1200.753 | 0.753 |
| 1300 | 1299.78 | -0.220 |
| 1400 | 1400.421 | 0.421 |
从表中可以看出,磁致仲缩位移传感器的线性度较好,在千分之一左右,表1中线性误差具体计算数值为0.168%,其性能指标符合飞行模拟器设计指标的要求。
4结束语
采用磁致仲缩位移传感器作为位置反馈检测元件的飞行模拟器,使飞行仿真更加逼近真实的飞行。由于磁致伸缩位移传感器是一种非接触式传感器,因此使用寿命长、维修保养周期长,其简单的结构便于安装,高精度、高性能、灵活的测量方式保证了飞行模拟器的性能指标要求。实际应用表明,传感器的可靠性和系统维护稳定性较好,必然会越来越得到广泛应用,发展前景十分广阔。
 微信扫一扫
微信扫一扫
