


磁致伸缩原理概述
磁致伸缩原理是,当铁磁体受到外磁场作用而磁化时,其磁畴结构将发生变化,晶体的原子间 距随之改变,致使铁磁体的体积、形状发生变化,特别是铁磁体物质在磁场方向的长度发生变化。 这种磁效应就称之磁致伸缩。以往设备在前大梁用4组电机拉动钢丝绳实现倾转功能,倾转位置用10多个开关限位进行检测。若在液压缸中采用磁致伸位移传感器检测倾转位移,不但简化硬件系统,而且提高使用寿命和降低保养周期。
磁致伸缩技术的应用
磁致伸缩技术首次成功应用是在1940年,被用在潜艇声纳测距系统上,经过多年以来不断的发展使磁致伸缩技术日益成熟,并在多种领域和场合开始使用。磁致伸缩位移传感器就是磁致伸缩技术应用的一个实例。磁致伸缩位移传感器就是采用磁致伸缩原理进行高精度、可超长行程测量的新型位移传感器,其位移测量一般在0~5000mm,是一种非接触式位移传感器,不存在摩擦和磨损,传感器通常由单片机组成的信号处理电路和作为传感元件的磁致伸缩线组成。
磁致伸缩位移传感器的组成与工作原理
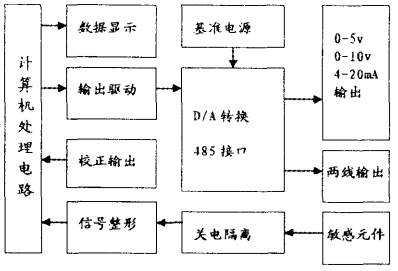
磁致伸缩位移传感器由外壳、不锈钢测杆、波导线(磁致伸缩线)、可移动的磁环及由单片机组 成的电子部件所组成,是磁致伸缩原理的一种应用。它的工作原理是利用两个不同磁场相交产生一个应变脉冲信号,然后计算这个信号被探测到所需要的时间,从而换算出两个不同磁场相交时所处的位置。这两个磁场一个来自可移动的磁环,另一个由电子部件给出的电流脉冲(询问脉 冲)在波导线上产生并沿波导线传播。当这两个磁场相交时磁场的矢量叠加会形成螺旋场,产生瞬时扭力,使波导线扭动而产生张力脉冲。把这个张力脉冲作为回应脉冲,此时只要测得回应脉冲与询问脉冲的时间间隔再乘以一个固定的传播速度,便能计算出可移动磁环所处的位置。将可移动磁环与被测物体安装在一起就成为了一个具 有实际意义的位移传感器了。同时,由于此传感器的输出信号取决于可移动磁环的位置,所以它是一个测量绝对位移量的传感器。
1、缩位移传感器的主要技术参数
线性量程 50~5000mm
线性误差 ≤±0.05%FS
重复精度 ≥±0.002% FS
工作电源 多种可选
信号输出类型 多种可选
2、环境可满足
温度 -20℃—+120℃
湿度 ≤95%
振动 <2.3g
工作方式 连续
磁致伸缩位移传感器在岸桥液压缸位置检测上的应用
深圳盐田港集装箱码头的岸桥在吊具倾转液压系统中使用了我司生产的RH系列的磁致伸缩位移传感器。它被安装在倾转液压缸内用于测量液压缸的绝对位置,它的测量范围 是50~1400mm,对应的输出是4—20mA 的直流电流,工作电压是24V±2.4V DC,测量的线性误差小于±0.05%FS,重复精度大于±0.002% FS。在使用中直接将它的4~20mA 的电流送入岸桥 PLC 模拟模块的输入端,通过PLC 的内部程序对其进行运算,得到液压缸的实际位置后与给定的位置进行比较,最后达到自动控制的目的。
结束语
由于磁致伸缩位移传感器是一种非接触式传感器,因此使用范围广、寿命长,维修保养周期长、费用低。大深圳盐田港集装箱码头的岸桥,采用4 组磁致伸缩位移传感器,实现液压缸的位置检测功能,使用结果表明:传感器的可靠性和工作精度都达到了出厂指标,使系统维护更加方便。
 微信扫一扫
微信扫一扫
