

燃油加油机作为油品贸易结算的强制检定计量器具,其计量准确关系着经营者和消费者的合法权益。在JJG 443-2006《燃油加油机》检定规程中提出影响加油机检定的两个关键问题:一是油的温度测量问题;二是加油枪流量测量问题。传统的燃油加油机主要采用容量比较法进行,即燃油加油机向标准金属量器加入定量油品,人工读取液位高度,秒表手动测量注油全过程时间,并在计量颈内放置温度计来人工读取油枪口温度和标准量器内油品的平衡温度,再通过人工计算得到标准容积,与燃油加油机示值进行比较计算。传统的检定模式存在如下缺点:1)液位值采用人工肉眼读取,数据准确性差,且安全性和可靠性低;2)流量测量方法是根据燃油加油机的全量程体积值与加油时间之比来计算,由于秒表计时受人为因素影响较大,且加油起始和结束阶段流量不稳定,导致所得到的流量数值与实际误差较大,甚至可能影响检定结果;3)温度测量多采用水银温度计或数字温度计进行全进式或半进式操作,出口温度测量受环境温度影响大,误差大且没有防爆设计。
因此,相关单位设计了一种新型燃油加油机自动检定系统,本质安全可以在加油站使用,对燃油加油机检定中的各个环节进行自动监测记录,并实现加油机油枪出口温度、标准器内温度、体积和流量等参数的自动采集测量、计算等功能,并在检定完成后,自动处理和显示结果,自动生成原始记录。其可降低人工操作的繁琐程度,提高检定效率,同时保证数据的准确性和可靠性,有效提高计量检定准确度。
燃油加油机自动检定系统硬件结构
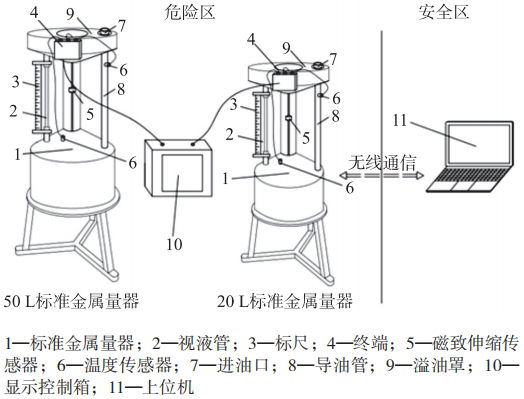
燃油加油机自动检定装置硬件结构如图1所示,其中油品从进油口进入后,经由导油管注入底部,注油过程中由油品飞溅引起的气泡大量减少,有效减少检定人员等待时长。液位传感器固定在溢油罩上,可防止油品溅出,影响计量准确度。两路温度传感器测量加油机油枪出口温度和标准量器内油品的平衡温度,准确、安全且可靠。
1、液位传感器
油品液位计量采用磁致伸缩液位传感器,其工作原理是利用两个不同的磁场相交使波导管发生波导扭曲,产生超声波信号,然后通过计算检测时间即可得到动磁铁的准确位置。针对标准容器的高度,20 L 罐体搭配量程 0~510 mm 的测量杆,50 L罐体搭配量程 0~670 mm 的测量杆;由于燃油具有腐蚀性,测量杆应为厚壁、耐腐蚀的不锈钢管材;直径为 10 mm,在考虑结构强度情况下尽可能小,以满足分度容积的要求;浮球为圆柱体,半径 10 mm,高 30 mm。
2、防爆
燃油加油机检定过程在加油站内进行,由于加油站是经营易燃易爆危险品的场所,需要防火、防爆、防雷以及防静电等,安全工作要求高,因此燃油加油机自动检定装置在设计时需要考虑在加油站内(即危险区)的硬件防爆设计,包括元件防爆和电路防爆等 [7-8]。电路防爆通过安全栅实现,在输入、输出和电源三方之间形成电气隔离,可以达到限能的目的。安全栅放置在显示控制箱中,显示控制箱采用隔爆型防爆箱,通过接线电缆与外部设备连接。接线电缆只需要本安电缆,不需采用防爆管连接,整套装置更加轻便、灵活。数据处理在上位机进行,置于安全区,两者之间为无线通信。燃油加油机自动检定系统中的温度传感器和磁致伸缩传感器采用间隙隔爆的原理,将可能产生电火花、电弧等的电路都密封于电子头。当腔内产生高温高压气体时,可通过接合面间隙减温减压,将爆炸的能量隔绝在腔体内部,无法传导到腔外,保证安全。
燃油加油机自动检定系统检定流程
燃油加油机自动检定系统进行燃油加油机检定时的实施流程如图 2 所示。上位机发送开始检测命令,在注油口开始人工注油,磁致伸缩传感器和两路温度传感器同时启动,并实时传输数据至测量终端,具体流程如下。
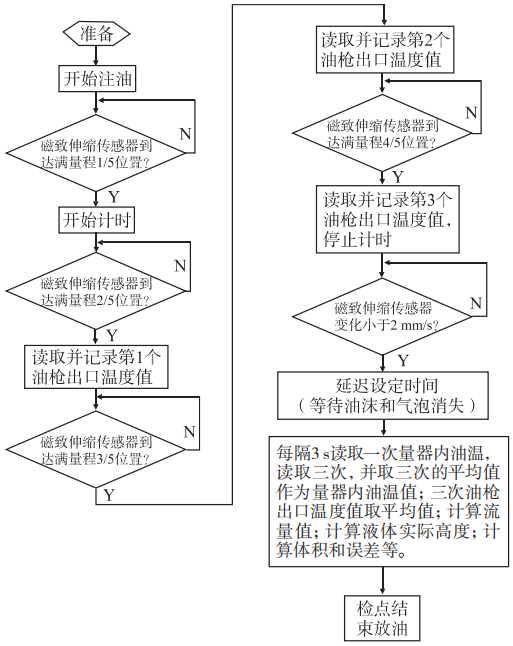
1)采用注油中段测量法,即取磁致伸缩传感器到达满量程 1/5 位置到 4/5 位置之间的体积和注油时间,来计算注油过程的流量,区别传统的采用全段计量流量的方法,可以有效避免加油起始和结束阶段流量不稳定带来的误差,同时软件自动化操作可以有效避免人工秒表计时的操作误差。
2)多次试验后,发现在磁致伸缩传感器到达满量程 2/5 位置、3/5 位置、4/5 位置时,各采集一次油枪出口温度,并取平均值作为最终结果能较好地反映全量程的温度情况。
3)当磁致伸缩传感器变化小于 2 mm/s 时,认为注油过程已结束,为了等待油沫和气泡消失,需延迟一定时间读数。延迟时间到达后,每隔 3 s 读取一次量器内油温,共读取三次,并取平均值作为最终结果,同时读取磁致伸缩传感器输出数据以计算体积等参数。
数据处理
1、温度参数
油枪出口温度和量器内油温各测量记录三次,取平均值作为测量结果。
2、流量
已知标准量器注油从磁致伸缩传感器的满量程1/5 位置至 4/5 位置时,油体的体积为 V,注油时间经测量为 t,则流量 Q = V/t。
3、体积
检定过程得到磁致伸缩传感器输出的液位高度,经过以下过程得到体积值:将传感器输出的线性信号转换为浮球距离零位值的高度;由于磁致伸缩传感器的浮球是用水进行标定的,对高度值进行油体密度修正;根据计量颈的分度容积,将高度值转化为体积值;最后根据油枪口处油温和量器内的油温,进行温度修正得到实际体积。
试验验证
应用本文燃油加油机自动检定系统装置测量某加油站加油机,检定界面如图 3 所示,可显示检定过程实时信息和参数,检定完成后可显示油品体积、误差和重复性等参数,系统操作方便、简洁。

结语
本文设计的燃油加油机自动检定系统相比于传统的检定模式具有如下优点和改进。
1)测量过程和数据处理无需大量人工操作,提高了系统的自动化程度,同时保证了数据的准确性和可靠性,有效提高了检定准确度。
2)采用磁致伸缩传感器测量油体液位,相较于人眼识别,提高了测量准确度。
3)取磁致伸缩传感器到达满量程 1/5 位置到4/5 位置之间的体积和注油时间,来计算注油过程的流量,可以有效避免人工秒表计时的操作误差以及加油起始和结束阶段流量不稳定带来的误差。
4)液位高度处理算法可以避免磁致伸缩传感器带来的浮球密度误差和温度误差等,提高装置的准度。
 微信扫一扫
微信扫一扫
