

磁致伸缩位移传感器:波导钢丝、位置磁铁、波检测器、电子系统。
电子系统:激励信号发射电路,回波信号检测电路,信号处理电路、接口电路。
位置磁铁安装在液压缸缸杆顶端,传感器主体则装在缸头上。
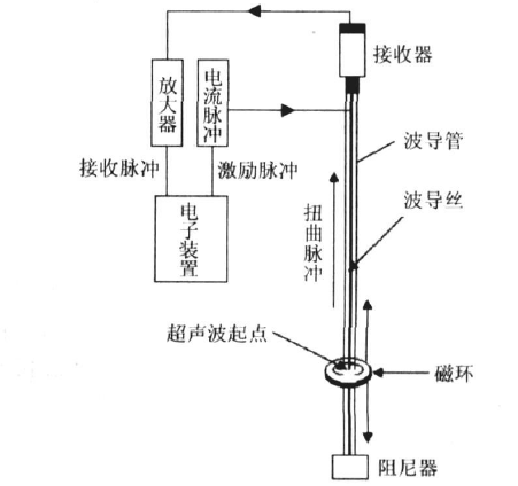
脉冲发生器在磁致伸缩波导丝上施加一个电脉冲信号, 电脉冲同时伴随一个环形磁场, 以光速沿波导丝向下传播, 该磁场遇到浮子内磁铁形成的磁场时相互迭加时, 根据威德曼效应(在磁性体上形成适当的磁路,当有电流通过时, 磁性体发生扭曲变形, 这种现象称为威德曼效应)波导管瞬间变形产生波导扭曲, 同时产生一个应变脉冲的超声波信号, 在波导管中以固定的速度向两端传播。传到末端时, 其能量将被衰减阻尼装置吸收,传到控制器一端时, 超声波被回波接收装置接收并转换为电脉冲, 该电脉冲放大后送到主要由计数器组成的测量电路中。测出脉冲发射与脉冲接收两者之间的时间间隔, 乘以超声波的速度, 即可得到磁铁的位置, 实现位置测量。
位置计算:测量时差除以传送速度,称为倒置恒数(Propagatio Constant),或倾斜度(Gradient)。传送速度是以倾斜度方式印在标签上。
若时差为130.555μm,倾斜度为9.000μm/in,则传感器的位置:
位置=时差(μm)/倾斜度(μm/in.)-零点之位置(in.)
=130.500/9.000-4.500=10in. (为254mm)
其中,4.5in.为死区零区之和。
 微信扫一扫
微信扫一扫
