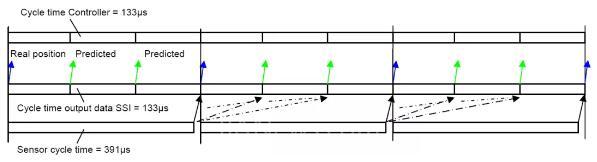
同步模式2提供了高速更新功能,当运动控制程序需要比磁致伸缩位移传感器测量周期更快的新位置数据时,高速更新功能提供动态计算的数据值。当位移传感器尚未完成下一个测量周期时,传感器会将最新测量值和预测算法值叠加的位置值来提供给运动控制器。这些推算值被控制器用作更新的位置数据,允许非常快的控制器循环时间,很适合用在一些高速运动控制的领域。
图中可见,控制器询问周期快于位移传感器测量周期,因此绿色箭头部分的位置值是通过最新的蓝色箭头测量叠加计算值后给出的传感器位置,以适应高速的控制器循环周期。


 微信扫一扫
微信扫一扫
