

磁致伸缩位移传感器是一种以扭转超声波作为传播介质的磁致伸缩式传感器。这种位移传感器安装很简单、方便,能承受高温、高压和高振荡的环境。最重要的一点是它具有其它位移传感器所不能达到的测量大位移、高精度的特点。
1、磁致伸缩位移传感器工作原理
基于Wiedeman效应,磁致伸缩位移传感器的工作原理就是使两个不同磁场相交产生磁致伸缩扭转效应,发射扭转波,利用磁致伸缩逆效应,接收线圈接收该信号。计算这个信号被探测所需的时间,便能换算出准确的位置。

如上图所示,这两个磁场一个来自传感器外面的活动磁铁,另一个则源自传感器内波导丝的电流脉冲。电流脉冲是传感器的固有电子部件产生的,使磁致伸缩丝周围产生一个磁场。这个磁场与活动的磁性元件磁场矢量相加形成一个螺旋形磁场,从而使波导管发生扭曲并产生的一个应变脉冲。这个脉冲会以声速运行回电子部件的感测线圈。从产生电流脉冲的一刻到测回应变脉冲所需的时间乘以固定声度,便能准确的算出位置的变动。这其实是活动磁铁的位置变化。这个过程是连续不断的,所以每当活动磁铁被移动时,新的位置很快就会被感测出来。当然,由于传感元件都是非接触的,所以就算感测过程是不断重复的,也不会对传感器造成任何磨损。由于电子部件可探测由同一询问脉冲所产生的连续磁波,所以在同一传感器上可装配多个活动磁铁。这样做可省去额外所需的传感器以降低成本。
磁致伸缩位称传感器的位置计算环节非常简单,将所测量的时差乘以一个传感器传送速度的系数。
位置=时差×传播速度-零点位置
(零点位置为零区与死区之和)
2、磁致伸缩位移传感器的计时方法实现
时差的测量是计算位置精度的关键。计时功能的实现是要保证在询问脉冲开始时计时,而在接收到回波信号后停止计时。
2.1传统的计时方法
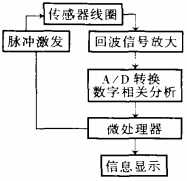
采用模拟或数字电路实现。磁致伸缩位移传感器电路的设计包括脉冲激发电路,信号放大电路,过零检测电路,计时电路以及A/D转换电路。磁致伸缩位移传感电路结构原理框图如下图所示。

其中脉冲激发电路由TTL非门组成振荡器或由微处理器编程产生周期性窄脉冲矩形波,控制MOS场效应晶体管向传感器线圈提供脉冲电流,使线圈产生的脉冲磁场与磁致伸缩敏感元件的恒定磁场相互作用在传感器的磁致伸缩敏感元件中激发扭转超声脉冲,电路产生的周期性窄脉冲矩形波的周期应大于超声脉冲在试样中的传播时间。
放大电路为电压放大器,采用集成运算放大器构成,由于线圈拾取回波信号的感应电动势较大,所以采用两级放大即可。
放大后的信号送入过零检测电路,检测出回波脉冲的到达时刻,控制计数电路记录触发脉冲和回波脉冲的时间间隔。过零检测电路的输出对D触发器进行控制,以产生计数门控信号。
计数脉冲由精密石英晶体振荡电路产生,计数脉冲信号和门控信号进行“逻辑与”运算后输入计数器对两脉冲的时间间隔进行计数,计数脉冲频率越高,声时测量的分辨率越高。
A/D转换电路对线圈接收的回波信号进行模/数转换。A/D转换器的最高采样频率和转换位数对测时准确性和测量范围有影响,因此应根据回波脉冲频率,和每一脉冲波形的采样点数选择不同频率和位数的A/D转换器。由于回波脉冲的频率一般在500kHz以下,考虑每一脉冲波形的采样点数不少于10个并保证较高的幅值分辨力,本设计选用采样频率为5MHz的12位A/D转换器。
2.2软件计时方法
由于硬件计时实验采用电压输出,输出值不稳定给读数造成不便,而且输出结果也受到电压表可读位数的限制,本设计同时采用了一种新的软件计时方法代替硬件电路的计时。利用输入输出信号在时移中的相关性计算两个信号间的时间差,进而测量距离是相关函数的一个十分有效的应用方向。本论文所讨论的磁致伸缩位移传感器采用软件计时方法不仅可行,两种实验比较的结果也证明了新计时方法的线性度更高,稳定性更好,电路简单,省去了电路放大后的其它部分,用于试验和数据分析非常方便。软件计时在主要工作在微机内进行,同样采用5MHz的信号采集卡工作,选用Matlab软件编程对信号进行分析与处理,输出结果可直接显示位移量。
通过放大和比较电路,输出信号中包括了回波信号与询问脉冲,利用回波信号和询问脉冲之间的互相关计算,求得互相关函数的极值点所对应的时间T既是激励信号与回波信号的时间差。工作原理图如上图。
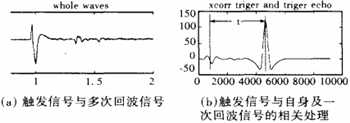
回波信号中不仅包括触发信号、从磁铁位置激发的扭转波,还有扭转波在端点反复振荡,不断衰减的反射回波信号如图(a)所示。放大的回波号经高速数据采集,截取触发信号与磁铁位置激发的扭振动脉冲,与触发信号进行互相关分析,计算结果如图(b)所示。中心区域的波形代表了触发信号自相关部分,最大值点代表了触发信号本身的自相关最大点,该点对应时间应视为时间0点。由于回波信号相对触发信号反向,左侧反向的波形代表回波与触发信号的相关部分,取其最小值点与第一个极大点间的时间间隔正是扭转波从磁铁位置传播到接收线圈的时间差。
3、实验结果
设计磁致伸缩位移传感器,同时采用上述两种计时方法测量。可以明显反映出软件计时的线性度优越。软件计时方法的线性度明显高于硬件计时方法的。
本文介绍用通常的硬件计时与软件计时两种方法,实验论证新计时方法能够获得更高的精度与可靠性。
 微信扫一扫
微信扫一扫
