

1、引言
磁致伸缩位移传感(Magnetostrictive Displacement Sensor)利用磁致扭转波作为传播媒质的磁致伸缩式传感器。该传感器具有其它位移传感器所不能达到的测量大位移、高精度的特点,已应用于美国、欧洲的石油、化工、纺织、轻工、冶金、电力、医药、食品、国防等部门,特别是由于磁铁不和传感器直接接触,因此传感器在恶劣的工业环境如易燃、易爆、易挥发、有腐蚀的场合的汽车制造、化工、冶金矿山、体育,医疗机械中的定位和位置测量,液位监控等尤其合适。此外,传感器更能承受高温、高压和高振荡的环境。传感器输出信号为绝对数值,所以即使电源中断重接也不会对数据接收构成问题,更无须重新调整零位。最后,由于传感组件都是非接触的,所以即使感测过程是不断重复的,也不会对传感器造成任何磨损。如美国MTS公司的Temposonics磁致伸缩线位移传感器它重复精度及分辩率均达到0.002mm,而国内只有几所大学的研究所正在进行研究,很多研究所仅处于引进国外的产品的应用研究阶段。本文参考国外的先进经验设计研制一套达到一定精度要求的位移传感测量装置。
2、磁致伸缩工作原理
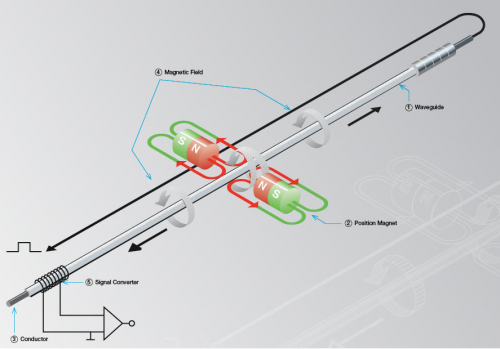
磁致伸缩传感器基于磁致伸缩和逆磁致伸缩效应。磁致伸缩是指磁化使铁磁材料产生机械应变的效用。反过来,铁磁材料受到机械应力之后,其磁化状态也会发生改变,称之为逆磁致伸缩效应。一些金属(如铁或镍)在磁场作用下具有伸缩能力,磁致伸缩的效果是非常细微的。一般的镍铁合金是30ppm,但科学界已研制出更新的物质,它的磁致伸缩效应提升至1500ppm以上。磁致伸缩是利用两个不同磁场相交产生一个应变脉冲信号(strainpulse),然后计算这个信号被探测所需的时间周期,便能换算出准确的位置。如下图所示,这两个磁场一个来自在传感器外面的活动磁铁,另一个则源自传感器内波导管(Waveguide)的电流脉冲,而这个电流脉冲其实是由传感器头的固有电子部件所产生的。当两个磁场相交时,所产生的一个应变脉冲(strainpulse)会以固定速度运行回电子部件的感测线圈,基于逆磁致伸缩效应,通过感测线圈转化为电脉冲。根据Widemanm效应,金属随其瞬间变形产生波导扭曲。
应变脉冲信号的传播速度为
V=√G/p
式中G为波导管的剪切弹性模量,p为波导管密度
由于G和p均为恒定(对于一定的波导管来说)的,所以传播速度也恒定,为2.8km/s。这个过程是连续不断的,所以每当活动磁铁被带动时,新的位置很快就会被感测出来。由于输出信号是绝对位置输出,所以不存在信号漂移或变值的情况,因此无须如其它位移传感器一样定期重标和维护。
3、磁致伸缩传感器的结构设计
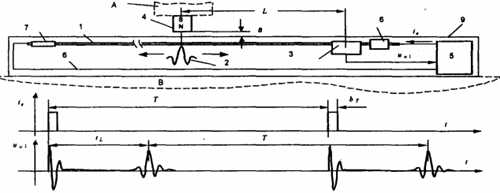
(1-波导钢丝;2-磁致旋转波;3-波检测器;4-位置磁铁;5-电子信号和处理系统;6-波反射器;7-减波元件;8-回线;9-传感器壳体)
磁致伸缩位移传感器(Magnetostrictive Position Sensor)的结构如图2所示。壳体采用铸铝铸造(耐腐蚀可在表面涂漆)。位置磁铁通常装在运动部件A上,而传感器主体则装在固定部件B上。传感器工作时,电子信号和处理系统(5)发给磁致波导钢丝(1)间隔为T的激励脉冲电流i。该脉冲电流将产生一个围绕波导钢丝(1)的旋转磁场。位置磁铁(4)也产生一个固定的磁场。在这两个磁场的共同作用下,使波导钢丝产生磁致弹性伸缩,即形成一个磁致旋转波(2)。该旋转波沿着波导钢丝以2800m/s的速度向两边传播。当它传到波导钢丝一端的波检测器(3)时被转换成电信号U。通过测量磁致旋转波从位置磁铁(4)传到波检测器(3)的时间tu就能确定位置磁铁和波检测器之间的距离。这样,当部件A和B产生相对运动,通过磁致旋转波位移传感器就可以确定部件A的位置和速度。
在波导钢丝的另一端,磁致旋转波将通过减波元件(7)被大大削弱,以避免反射的波形对测量精度造成影响。波反射器(6)是用于改善电信号u的波形和加强电信号的大小。
磁致旋转波位移传感器的测量原理是基于时间测量。位置磁铁和波检测器之间的距离可如下确定
L=VwtL
式中:tL为发射脉冲与反射脉冲的时间差
Vw为旋转波的波速
L为磁铁和波检测器间距
该传感器系统属于绝对测量系统。是传感器接通电源后,位置磁铁的位置可自动确定,断电对测量精度不造成任保影响。
4、磁致伸缩传感器的电子信号处理系统
电子信号处理系统的框图如下图所示。在微处理器系统的控制下,周期脉冲电流发生器向波导钢丝发送激励脉冲。由检测线圈输出的位置脉冲信号进行滤波和放大后。将进行零位或峰值检波,以便进一步确定位置脉冲信号从位置磁铁传到检测线圈的时间。经过进一步的信号处理,便可确定位置磁铁和检波器之间的距离,以达到位移测量的目的。
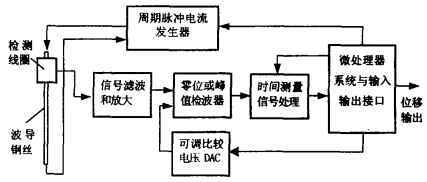
该处理系统具有如下功能:
(1)产生一个周期激励脉冲电流,该脉冲输入波导钢丝,以便围绕波导钢丝形成一个周期脉冲磁场。该脉冲的周期和宽度应通过微处理器编程来调节。为了获得较强的脉冲磁场,激励脉冲应具有足够的能量,即足够大的电流。
(2)模拟信号处理,对从波检测器(检测线圈)输出的位置脉冲信号进行滤波和放大,以便比较处理
(3)对放大后的位置脉冲信号进行零位或峰值检波,以便确定位置脉冲信号从位置磁铁传到检测线圈的时间
(4)时间测量和信号处理
(5)位置信号输出
5、磁致伸缩位移传感器的性能
(1)磁致伸缩位移传感器的精度极高。美国MTS公司的Tem-posonicsR型传感器达到2μm分辩率和重复精度,4μm滞后,RF型行程可达9m以上。本设计与德国传感器研究所合作,设计技术指标与测量范围:0~100毫米以及0~6米;模拟量输出:0~10伏或0~20毫安;数字量输出;分辩率为5微米、10微米、15微米;非线性误差:小于±0.05%FS;工作温度:-20~80℃。
(2)环境影响小。旋转波一般很难通过环境干扰和振动而产生,而传感器的波检测器被设计成只对旋转波特别灵敏。所以,磁致旋转波位移传感器具有很好的环境抗干扰能力。
(3)非接触式测量。传感器工作时,位置磁铁以一定的间隙a与传感器的主体作平行运动。最大间隙可达到30mm。最大间隙波动为±5mm。
(4)可实现温度补偿。通过温度补偿可使传感器的测量精度不受环境温度的影响。
(5)运动速度高。位置磁铁相对于传感器的主体的运动速度高。最大运动速度可达100m/s(主要适用于大范围量程)
本文分析了磁致伸缩位移传感器的原理、信号处理系统,该传感器可以实现高精度测量,精度主要取决于传感器制造工艺及电子信号的处理系统。我们与国外传感器公司及研究机构合作开发硬件及电子信号处理系统,降低了生产成本,将以性价比合理的产品投放到国际、国内市场。
 微信扫一扫
微信扫一扫
